2026 线上展厅
年份:
- 2026
- 2025
- 2024
地区分类:
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典
应用行业:
展馆划分:

5-P01
佛山德玛特智能装备科技有限公司
主营产品:
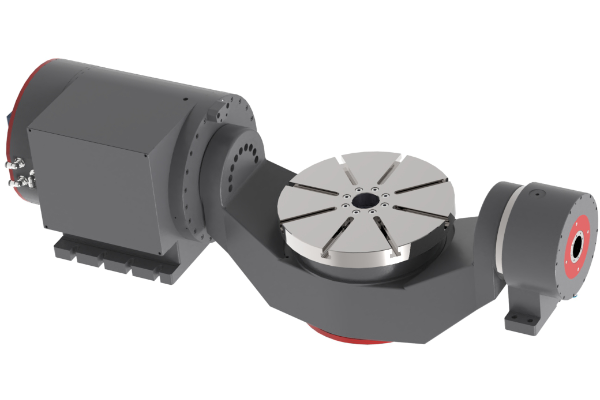
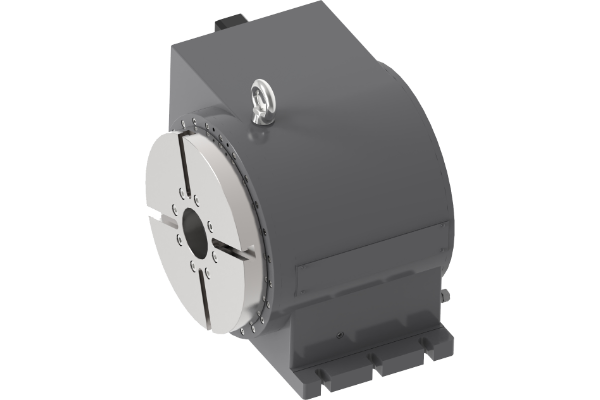
公司生产的自冷/水冷直线电机,直线模组,无框直驱电机、直驱旋转平台、数控四轴/五轴转台、精密大理石平台等产品广泛应用于半导体,LED,3C电子产品、锂电池、新能源汽车、数控机床等产业设备中。
应用行业: CNC/钣金/冲压/压铸等加工
1-F01
果栗智造(上海)技术股份有限公司
主营产品:
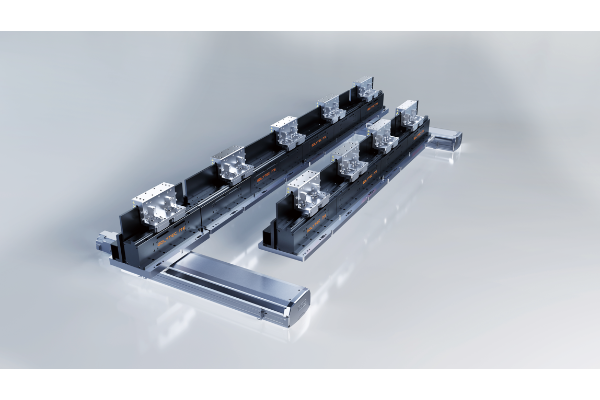
磁悬浮传输线
应用行业: 汽车、摩托车整车及零部件制造,半导体加工/制造,重工(航空航天/轨道交通/工程机械/船舶等),医疗器械制造、生物科技,电子及产品制造,新能源技术
4-B70
东莞市稳锐五金模具有限公司
主营产品:
专业机加工 从大到小 从方到圆 强项:单散件与中小批量生产制造!!!
应用行业: 五金模具,塑胶模具,自动化设备及配件,工装夹具,治具

3-G62
深圳市华成工业控制股份有限公司
主营产品:
线性机器人控制系统、多关节机器人控制系统、具身智能控制系统等,涉及码垛、搬运、焊锡、点胶、喷涂、折弯等应用场景,广泛应用在注塑、金属加工、3C、包装、锂电、新能源等行业。
应用行业: 工业机器人及相关配件制造/工业互联网,机器人,非标设备,注塑,车床
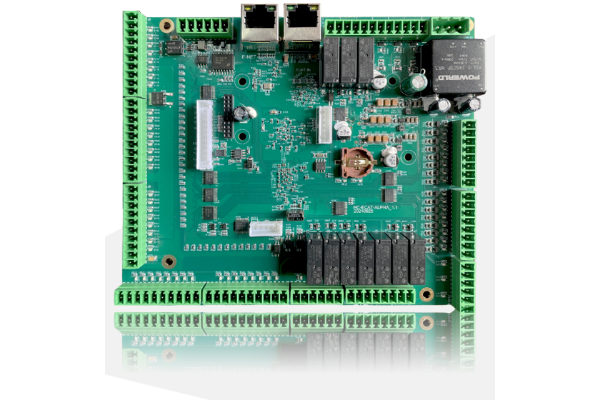
EtherCAT总线型机床机械手控制系统
集成了丰富高效的运动指令和逻辑指令,可完成复杂逻辑动作编程。按需扩展至多1块IO板,确保系统高精度地完成运动控制和及时相应外部输入信号。此外,丰富的扩展通讯接口可以灵活配合其他生产辅助设备使用。针对车床上下料场景,增加了双料盘模式,支持双臂防碰撞,可有效避免人身财产损失。支持ethercat通讯,可适配不同的伺服厂家。

具身机器人控制系统
具身机器人控制系统是一套面向高自由度具身机器人开发的智能控制平台,专注于多轴协同与整机级协调运动,是新一代具身智能体的核心驱动。系统采用双主站控制架构,整体控制周期达到1ms。由此带来更高的实时性与稳定性,保证14轴双臂在高速动作下依然保持精确协同,可扩展至头部与腰部等更多自由度的协调控制。

QC-S5R视驱控三机一体注塑模具保护系统
集成先进技术与双重锁模安全防护,通过减少一次撞模/停产损失即可收回系统成本,平均ROI-6个月,人机界面直观灵活,可靠性全面升级。现创新融合视觉一体集成,实时监控模内异常,精准防撞模、省维护,一站式实现降本增效与智能管理,守护模具安全与品质无忧。
4-K305
江西荣霸机械有限公司
主营产品:
压缩空气净化设备 冷冻式干燥机
应用行业: 电子及产品制造

3-H36
广东尚坤工业集团有限公司
主营产品:
尚坤工业主营产品:工业门锁、铰链、把手、搭扣、轻型/重型脚座、医用置物架等工业箱体结构件。产品广泛应用于新能源环保设备、高低温环境模拟试验设备、冷库冷链设备、航空船舶铁路特种设备、生物医疗设备、锂电自动化设备、3C及半导体自动化设备、食品机械、通信设备、屏蔽隔音设备、钣金机壳、机床设备以及常规生产设备等行业。工业密闭箱体结构件整体解决方案。
应用行业: 新能源技术,电子及产品制造,半导体加工/制造,医疗器械制造、生物科技,CNC/钣金/冲压/压铸等加工,模具设计与制造,行业专用设备及非标自动化设备,机床工具/工业测量/3D打印设备制造,工业机器人及相关配件制造/工业互联网

5-U18
东莞市骏鸿管业有限公司
主营产品:
波纹管、金属包塑软管、无尘拖链、拖链、防爆软管、PU气管、不锈钢软管、防护罩、竹节管、钢丝水管、喉箍、金属接头、软管接头、浮球液位计等产品
应用行业: 半导体加工/制造,医疗器械制造、生物科技,行业专用设备及非标自动化设备,机床工具/工业测量/3D打印设备制造,工业机器人及相关配件制造/工业互联网



1-D30
东莞市禹瑞机电设备有限公司
主营产品:
CRIUS·信瑞智能主营PPU机械手、直线电机、滑台模组、冲压机械手、柔性上料机等工业自动化产品及自动化设备整套解决方案
应用行业: 新能源技术,半导体加工/制造,医疗器械制造、生物科技,CNC/钣金/冲压/压铸等加工

PPU机械手
采用纯凸轮机械结构,动作灵活、顺畅,高速稳定,行程范围60mm-328mm,近500种派生可供选择;循环时间可达0.4S,速度比滑台模组快3倍,无冲击惯量,重复精度可做到±0.02mm,可实现局限空间内高速度高精度的自动传输、拾放、搬运、移栽的准确运动。

磁悬浮直线电机
将电能直接转换成直线运动机械,不需要任何中间转换机构的传动装置,不受中间机构的惯量和阻力影响,从而响应速度更快、灵敏度更高、随动性更好、更高效,结构更简单并拥有更准确更稳定的定位精度。同时直线电机动定子悬浮不接触运行,不发生磨损,寿命更长,行程也不受限制,可多动子同轴使用,使用范围相当广泛。

冲压机械手
高性能伺服电机驱动,能够实现快速定位、升降、移动等动作,具有高精度和稳定性,可替代多个人工在冲压工位上工作,对于冲压等重复性、危险性、节拍高的加工行业,摆臂式机械手在节约人力劳动成本,提高人工及设备安全性,保持产品产能、质量、工艺稳定性等方面起着举足轻重的作用。
2-G23
山东派智新能源科技有限公司
主营产品:
主要生产14280、14500、18500、18650等圆柱型锂电池,主要应用与医疗器械,Ebike,E-motor,工具,个人护理等领域
应用行业: 新能源技术,医疗器械制造、生物科技,电子及产品制造,工业机器人及相关配件制造/工业互联网,家电及厨卫

5-J22
佛山市台亚机械设备有限公司
主营产品:
住友减速机,日静(GTR)减速机,台湾汉达减速机
应用行业: 新能源技术,电子及产品制造,汽车、摩托车整车及零部件制造,半导体加工/制造,模具设计与制造,CNC/钣金/冲压/压铸等加工,医疗器械制造、生物科技,重工(航空航天/轨道交通/工程机械/船舶等),家电及厨卫

