2026 线上展厅
年份:
- 2026
- 2025
- 2024
地区分类:
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典
应用行业:
展馆划分:

1-B05
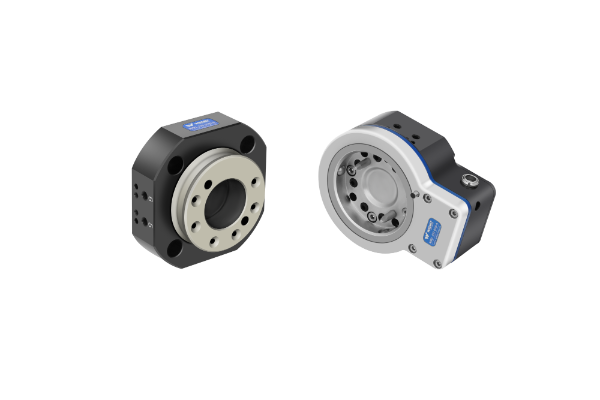
威模技术(上海)有限公司
主营产品:
从微米级精度的机器人快换、模块连接系统、机械夹爪,到智能协作机器人的电动快换、电动真空系统,WEMO始终秉持“精准连接生产需求,高效驱动自动化升级”的核心宗旨,以极致性能让工业机器人的“双手”更灵巧、更可靠,持续为全球制造业创造不可替代的技术价值。
应用行业: 汽车、摩托车整车及零部件制造,新能源技术,CNC/钣金/冲压/压铸等加工,行业专用设备及非标自动化设备,工业机器人及相关配件制造/工业互联网

1-C01
珞石机器人
主营产品:
珞石新一代柔性协作机器人,通过赋予机器人智能力觉与视觉,使原来示教-执行的开环执行过程,变为能够与环境动态交互的智能闭环执行过程,达到与环境及人安全、准确交互的目的,以更具颠覆性创新的技术特性,将机器人拓展应用到更广阔的场景中,成为人类生产生活的得力伙伴。
自珞石工业机器人问世以来,它们便以不同的工作范围和负载能力,高精度与高速度的完美结合,广泛应用在上下料、去毛刺、检测、涂胶、分拣、装配、搬运等不同生产环节,在各个行业中均有出色的表现。经过持续数年的产品迭代和细节打磨,ROKAE不断提升机器人的可靠性,提高运动速度,将更多功能集成到紧凑的产品中,让应用更简单,让生产更稳定,让智造更高效
应用行业: 工业机器人及相关配件制造/工业互联网,3C及电子制造,模具及配件,新能源及汽车零部件,金属制品,家电及厨卫,机加工/精密零件制造,光通信及半导体

具身智能方向展示:
Helios轮式双臂机器人 HSA高性能一体化集成力控关节 轮式双臂机器人曲面恒力打磨 应用方向:人工智能、数据采集、学习训练场景,以及工业领域中的料箱搬运、复杂物料分拣、精密装配、力控打磨等场景 核心优势:珞石轮式双臂机器人Helios,通过姿态-视觉-力控制策略实现多模态融合感知,结合激光SLAM导航,无需对环境进行改造,即可在复杂场景中自主导航与决策。轮式双臂机器人Helios搭载的人形力控臂AR同样由珞石自研打造,该力控臂采用高性能一体化集成力控关节模组HSA,内置高精度力矩传感器,具备轻量化高集成、高性能力感知、高扭矩密度等特点,加之依托珞石全球销量领先的全力控协作机器人产品基础,能够极大助力轮式人形机器人Helios在精密场景的极致力控表现,引领产业方向,助力智造升级。

协作机器人智能码垛工作站
珞石柔性协作机器人xMate CR系列搭配柔性化码垛抓手和升降柱,高效完成纸箱码垛作业,帮助各种规模企业实现灵活的码垛自动化。

锂电池力控检测插拔
应用方向:电视机HDMI/USB接口插拔、新能源汽车充电/检测、手机TypeC/卡托插拔、压缩机配管组装、电池连接片装配、笔记本内存条装配等场景。 核心优势:珞石柔性协作机器人采用全关节力控技术,每个关节内置高精度扭矩传感器,凭借自身力感知与力控制能力,以类人手臂般的柔顺操作完成锂电池多种场景的插拔作业。
1-C57
广东华沿机器人股份有限公司
主营产品:
主要从事协作机器人及其核心零部件的研发、生产及销售,产品包括Elfin系列协作机器人、Elfin-Pro系列协作机器人、Elfin-Ex防爆型协作机器人、S系列大负载机器人、Motor电机、Actuator 双关节模组、Servo Drive 伺服驱动、Actuator for Humanoid Robots 人形关节模组。
应用行业: CNC/钣金/冲压/压铸等加工,电子及产品制造,医疗器械制造、生物科技,重工(航空航天/轨道交通/工程机械/船舶等),金属及塑胶制品,行业专用设备及非标自动化设备,机床工具/工业测量/3D打印设备制造,工业机器人及相关配件制造/工业互联网,模具设计与制造,家电及厨卫,半导体加工/制造,汽车、摩托车整车及零部件制造

Elfin系列协作机器人
Elfin系列协作机器人,可应用于自动化集成生产线、装配、拾取、焊接、研磨、喷漆等领域,已成功出口到包括欧美日韩在内的40多个国家和地区。 Elfin系列协作机器人采用独特的双关节模组设计,一个运动模组包含两个关节,构成独特运动学结构,不仅在外观上区别于市面多数协作型机器人,在工作时也能获得更高的灵活度。

Elfin-Pro 系列协作机器人
Elfin-Pro系列协作机器人在Elfin系列的基础上研制而成,它延续了Elfin系列产品型号齐全、部署便捷、高精度、高灵活度及双关节模组设计、模块化设计等优势,同时对产品能力进行全新升级,集成前沿AI技术,实现一体化末端力控、一体化AI视觉,采用新的表面处理工艺,兼具美观与实用,达到性能更稳定可靠、人机协作更安全、应用场景更广泛的特点。

S 系列大负载机器人
S系列大负载机器人,具有大负载、大臂展等特点,能够轻松实现60KG超重负载、工作半径可达1700mm~2200mm,可广泛应用于机床上下料、码垛、装配及大负载搬运等应用场景。沿袭Elfin系列技术优势,在产品性能、安全防护、响应速度和抗干扰能力等方面均有质的跨越,是助力用户全面提升生产效率的利器。
1-L10
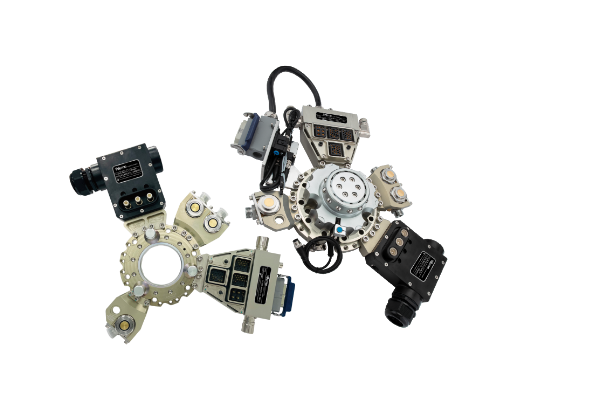
蓝点触控(北京)科技有限公司
主营产品:
传感器系列:
人形机器人六维力传感器LA系列
通用六维力传感器LB系列
关节扭矩传感器LC、 LD系列
拉压力传感器LE系列
柔性力控打磨抛光一体工作站
打磨、抛光、去毛刺工作站(双工位、四工位、六工位、八工位)
力控软件包
应用行业: 工业机器人及相关配件制造/工业互联网

.png)

7-S16
盛钰精机有限公司
主营产品:
夾治具/專用機//工作交換台/機械手自動化系統整合
应用行业: 汽车、摩托车整车及零部件制造,CNC/钣金/冲压/压铸等加工,家电及厨卫


1-R36
深圳市越疆科技股份有限公司
主营产品:
越疆CRA、Nova协作机器人系列、DOBOT ATOM 具身智能人形机器人系列
应用行业: 工业机器人及相关配件制造/工业互联网,电子及产品制造,半导体加工/制造,医疗器械制造、生物科技,CNC/钣金/冲压/压铸等加工,模具设计与制造,机床工具/工业测量/3D打印设备制造,行业专用设备及非标自动化设备,3C及电子制造,金属制品,新能源及汽车零部件,医疗器械,模具及配件,家电及厨卫

CR 系列协作机器人
CR 系列协作机器人拥有 3 ~ 30 kg 多种负载型号,覆盖 3C、汽车、半导体、金属加工、医疗、新零售等 15+ 行业 200+ 应用场景,具有安全高效、灵活易用等优点,在产线中可以快速切换作业,满足客户对性能、效率以及柔性化等方面的需求。

CRS 系列
CRS 系列是 CR 系列的升级版本,在延续 CR 系列灵活部署、简单易用、精度高等特点的基础上,配置了安全皮肤,实现非接触式检测及防护,将人机协作的安全性提升至全新高度。CRS 系列拥有 3 kg、 5 kg、 10 kg 三种负载,解决了许多客户无法兼顾安全与效率的难题。

DOBOT ATOM越疆具身智能人形机器人
是一款搭载了41自由度人形机器人,并配备6自由度灵巧手,适合高级开发者、商业和工业用户,提供完整的开发接口。面部搭载60帧Full HD高清双目相机,确保色彩还原和图像清晰度,减少第一视角操作时的眩晕感和果冻效应,兼容VR/MR设备的沉浸式体验。头顶配备Intel Realsense D455深度相机,深度探测可达6米。内置1500 TOPS AI算力,端侧算力领先。其可选配的具身智能套件,提供高精度 URDF 模型、开源训练框架与多模态数据工具,助力开发加速。Max版本支持远程遥控,可实现全身或上下肢分离控制模式。头部增加360°激光雷达,腕部和腰部各配2个深度相机,提升操作精度并探测障碍物。
5-T63
朗安(天津)精密机械有限公司
主营产品:
“朗小安”协作机器人、数控刀柄自动装卸设备、零点定位系统、快换盘、刀具柜等
应用行业: CNC/钣金/冲压/压铸等加工,电子及产品制造,汽车、摩托车整车及零部件制造,半导体加工/制造,医疗器械制造、生物科技,模具设计与制造
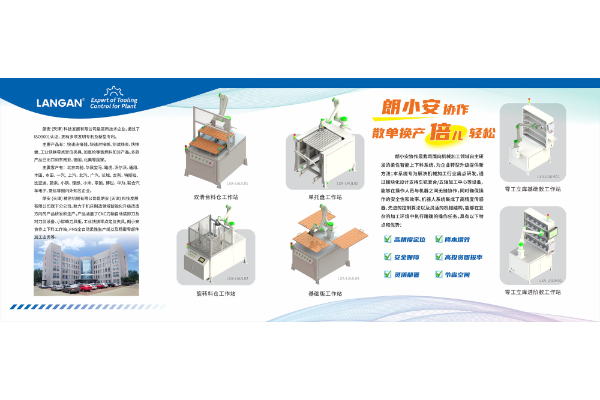
朗小安协作机器人
朗⼩安协作是我司⾯向机械加⼯领域⾃主研发的柔性智能上下料系统,为企业转型升级提供新⽅法;本系统专为解决机械加⼯⾏业痛点研发,通过模块化设计⽀持⻋铣复合/五轴加⼯中⼼等设备,能够在操作⼈员与机器之间⽆缝协作,同时确保操作的安全性和效率。机器⼈系统集成了⾼精度传感器、先进的控制算法以及灵活的机械结构,能够在复杂的加⼯环境中执⾏精确的操作任务,具有以下特点和优势:⾼精度定位、安全保障、灵活部署、降本增效、⾼投资回报率、节省空间。

数控刀柄自动装卸设备
数控(CNC)⼑柄⾃动切换设备(CHAS-A)是我司为解决⼿动换⼑问题专⻔研发⽣产的⾃动化设备,获得实⽤新型专利授予,是我司的标准化定型产品,适⽤于G/SK、UM、GER、A型、MS型等螺纹锁紧形式的⼑柄。

朗安工业快换夹具
LANGAN ⼯业快换产品⼴泛应⽤在⼯业各个领域,替代传统装夹⽅式,将⼯业制造“化繁为简”,⼤幅度提升⼯作效率,为客⼾⽣产设备释放最⼤价值。
3-P22
成都鑫德力科技有限公司
主营产品:
电磁制动器
应用行业: 工业机器人及相关配件制造/工业互联网,行业专用设备及非标自动化设备

1-K15
深圳市国盛动力科技有限公司
主营产品:
摆线针轮减速器、集成摆线关节
应用行业: 重工(航空航天/轨道交通/工程机械/船舶等),工业机器人及相关配件制造/工业互联网

1-T35
山东港智创信电子科技有限公司
主营产品:
六维力传感器、三维力传感器、单维力传感器、关节扭矩传感器、MEMS关节扭矩传感器、称重传感器等
应用行业: 其他,电子及产品制造



