- 2026
- 2025
- 2024
- All
- Mainland China
- Taiwan China
- Hong Kong China
- Germany
- Japan
- United States
- South Korea
- Italy
- Switzerland
- Sweden
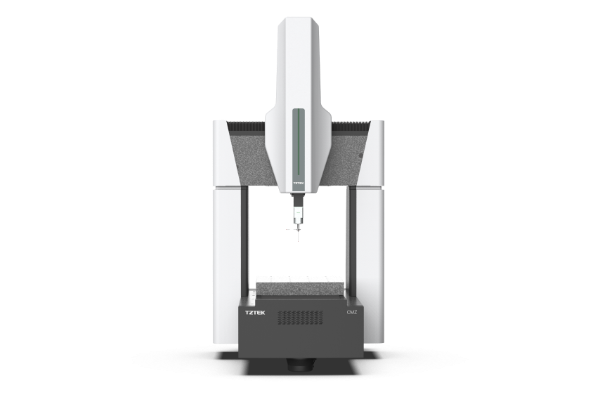
CMZ Zenith Coordinate Measuring Machine
CMZ ultra-high precision coordinate measuring machine is a high-end metrology equipment produced by TZTEK. The Z-axis is made of silicon carbide material, and the machine structure adopts a fixed-bridge design, ensuring the stability of the mechanical structure. The use of linear motors ensures both precision and higher measurement speed and acceleration, meeting the measurement needs of complex components. CMZ series boasts excellent accuracy, high efficiency, and stable performance, helping to achieve precise machining, assembly, and quality control. It is applicable in fields such as metrology, aerospace, national defense, automotive manufacturing, and electronics industry.
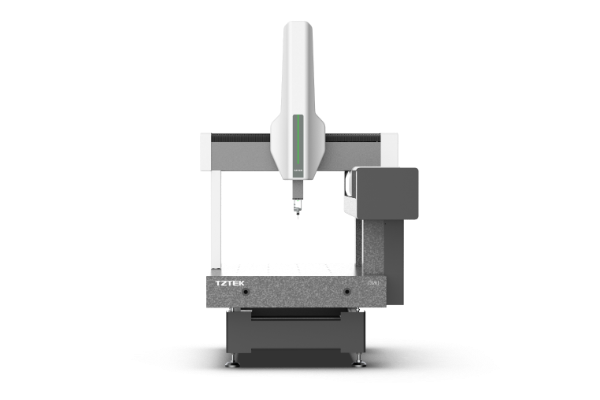
CMU Ultra Coordinate Measuring Machine
CMU high-precision coordinate measuring machine is a high-end measuring equipment produced by TZTEK. It adopts the form of single-side elevated structure, which makes the moving mass lighter and effectively improves the motion performance as well as the stability of accuracy. The use of linear motors provides higher measuring speed and acceleration while ensuring accuracy, which can meet the measurement needs of complex parts with excellent accuracy, high efficiency and stable performance, helping to realize precision machining, assembly and quality control. It can be applied in automobile manufacturing, medical industry, electronics industry and other fields.
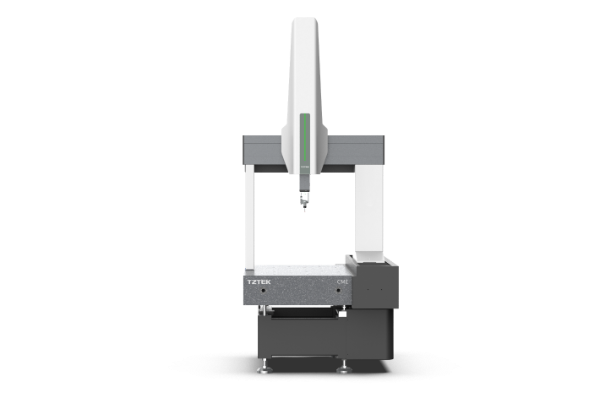
CME Economy Coordinate Measuring Machine
CME adopts stable rectangular beam structure to increase the rigidity of the structure, and the structure of the moving bridge design to ensure high efficiency and high precision measurement. CME series is designed to meet the user's basic needs for 3D measurements, with high precision, versatility, automation, flexibility, etc., providing stable and efficient measurement solutions for the production site and R & D centers. It is widely used in machinery manufacturing, mold manufacturing, automotive industry, electronic industry and other fields.

GEN3 Multidimensional Tactile Sensor

Multidimensional Tactile Dexterous Hand DexH13
The multidimensional tactile dexterous hand DexH13 is the world's first dual-modal robotic end-effector integrating "multi-dimensional tactile sensing + Al vision". It integrates 1140 ITPU mhulti-dimensional tactile sensing units in a single hand,with up to 15 dimensions of human-like perceptions. It can achieve multi-dimensional force array sensing and real-time analysis of 15 physica properties, including material, temperature, texture, etc. The DexH13 irnnovatively adopts a four-finger, 16-DOF (13 active + 3 passive) bionic structure design,and the thumb has an independent four activeDOF. By eliminating the redundant little finger, more than 90% of the core hand movements can still be completed. Additionally,the hand is equipped with an 8MP RGB HD eye-in-hand camera. Paired with flexible and compliant motion control and high-precision force control, it can precisely perform complex actions such as grasping, gripping, pinching, pressing,and opening/closing fingers.It expeerforms challenging tasks like fragile object manipulation and precision assembly, bringing unprecedented convenience anefficiency improvements to various fields, including industrial manufacturing, logistics and warehousing, medical and heaIthcare, and education and research.

Multidimensional Tactile Humanoid Robot TORA-ONE
TORA-ONE is the first humanoid robot with multi-dimensional tactile sensing in Embodied Al industry. It has 53 degrees of freedom (DoF), and equipped with a multi-DoF dexterous dual-arm and 4-finger bionic structure design hand. Both hands are integrated with 2280 ITPU multi-dimensional tactile sensing units. Empowered bythe advanced VTLA-Model (Vision-Tactile-Language-Action Multimodal Perception Model) and PX-Core (Visual-Tactile BimodalModel Control Architecture), TORA-ONE has acquired comprehensive, sensitive, and fine-grained perception and powertful interaction skills, which enable it to rapidly learn autonomously and adapt to different environments, while performing compliant and flexible interactive collaboration in various scenarios Additionally, TORA-ONE features a foldable design in its waist struecture,enabling it to adjust its height range from 1.46 m to 1.86 m to accommodate various working height requirements. This provides broad application across multiple scenarios such as industrial manufacturing, healthcare and wellness, and warehouse logistics.

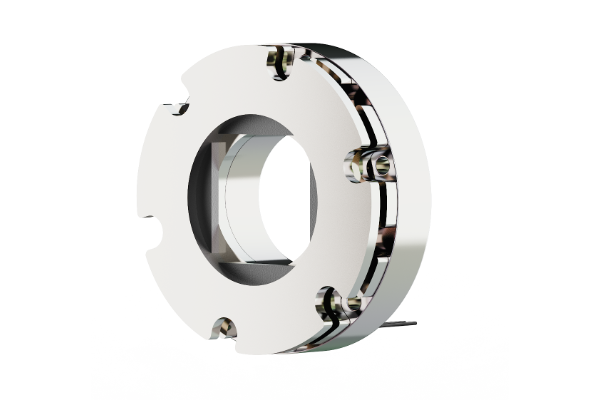
Permanent Magnet Brake
The permanent magnet brake is a device that relies on the magnetic attraction of the permanent magnet combined with the mechanical structure to achieve braking. When the power is off, the brake is held normally, and when the power is on, the demagnetization is released. Compact structure, low power consumption, quick response, stable braking and strong anti-interference performance, and is suitable for working conditions requiring energy saving and miniaturization, such as embodied robots, joint modules, automation equipment and the like.

ASF Servo-Series Brake
A special spring power-off electromagnetic brake for a servo motor adopts a normally-closed design, realizes a precise band-type brake by a spring force when the power is off, and realizes an electromagnetic pull-in release when the power is on, so as to meet the requirements of high-frequency starting and stopping and precise positioning of the servo motor. Compact structure, millisecond response, stable torque, low noise, no impact, good protection, suitable for servo motor, humanoid robot and other automatic precision transmission conditions.
BXR Ultrathin Series
BXR ultra-thin brake is designed for spring power loss, with a thickness of only 2/3 of the traditional model, and its ultra-compact structure greatly saves installation space. With lightweight low-inertia rotor, the backlash is very small, the braking operation is quiet and smooth, and it is suitable for precision transmission conditions such as servo motors and surgical robots.
EtherCAT Bus-type Machine Tool Manipulator Control System
It integrates rich and efficient motion instructions and logic instructions, and can complete complex logic action programming. Expand up to one IO board as required to ensure that the system can complete motion control with high precision and respond to external input signals in time. In addition, the rich extended communication interfaces can be flexibly used with other production auxiliary equipment. In view of the lathe loading and unloading scene, the double tray mode is added to support the double-arm anti-collision, which can effectively avoid personal and property losses. Support ethercat communication, can adapt to different servo manufacturers.

Body-embodied robot control system
The control system of embodied robot is an intelligent control platform for the development of high-Dof embodied robot, which focuses on multi-axis coordination and whole-machine coordinated motion, and is the core driver of the new generation of embodied agent. The system adopts dual-master control architecture, and the overall control cycle reaches 1ms. This brings higher real-time and stability, ensures that the 14-axis dual-arm still maintains precise coordination under high-speed action, and can be extended to the coordinated control of more degrees of freedom such as head and waist.

QC-S5R Injection Mold Protection System Integrated with Visual Drive and Control
Integrated with advanced technology and dual mode locking safety protection, the system cost can be recovered by reducing the loss of one mode collision/shutdown, the average ROI is -6 months, the man-machine interface is intuitive and flexible, and the reliability is fully upgraded. It is an innovative integration of vision, real-time monitoring of in-mold abnormalities, precise anti-collision of molds, maintenance saving, one-stop cost reduction, efficiency enhancement and intelligent management, and protection of mold safety and quality.

AI tactile sensor
This fingertip sensor is designed to simulate the tactile perception of human fingertips, using high-sensitivity sensing technology, especially with the ability of proximity, which can be used in the future. It can predict and perceive the existence and distance of objects before contacting objects, and can accurately capture the three-dimensional force, texture and temperature differences of contacting objects. This skill The technique improves the dexterity, accuracy and safety of the operation, enabling the robot to adjust its movements before contact, avoiding potential injuries or errors.

TS-V visual-tactile fusion training platform
TS-V vision and touch fusion solution is an advanced technology designed by Tashan Technology for complex environments, which aims to improve the operation of robots by integrating a variety of sensing technologies, including vision, proximity, contact and force. Accuracy and reliability in work. Considering the common transparent, reflective and small objects in the environment, as well as the uncertainty caused by occlusion, lighting changes and surface slippage, this solution provides a full view of the scene through the vision sensor. It helps the robot to do global motion planning. Proximity sense provides real-time feedback in the process of machine approaching objects, accurately detects the position and distance of environmental objects, thus making up for the system modeling. Error. Contact sense can sense the contact details that the camera can not capture, such as contact position and shape, and monitor the state of the object in hand in real time. Force sense enables the robot to perceive the overall force when interacting with the environment or objects, ensuring the flexibility and natural sense of interaction. The integrated application of TS-V vision and touch fusion solution makes the robot more flexible and accurate in performing tasks.

TS-R tactile service robot
The robot combines the tactile perception of Tashan technology with the polymorphic composite mobile platform of cloud trace technology, which can accurately perceive and adjust the force of delivering objects, and realize human-like service actions such as water delivery and microphone delivery. It is a typical demonstration of intelligent tactile landing service scenarios.
