- 2026
- 2025
- 2024
- All
- Mainland China
- Taiwan China
- Hong Kong China
- Germany
- Japan
- United States
- South Korea
- Italy
- Switzerland
- Sweden

DMU400 five-axis linkage machining center
DMU-400 X/Y/Z stroke: 586/370/350mm Distance from spindle face to table: +110 to -5 (-20 tool Angle) /360 infinity Table size: 400mm Maximum load: 100kg X/Y/Z fast displacement: 40/40/40m/min Maximum cutting feed rate: 20m/min Machine size: 3010X2040X2800
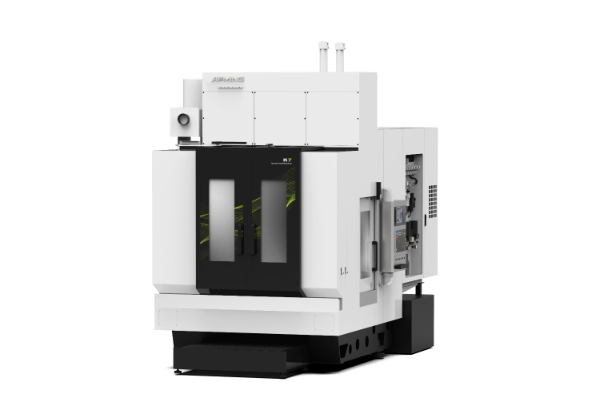
K7 horizontal five-axis machining center
1. K7 is of moving-column structure and equipped with high dynamic response drive lightweight design. X/Y/Z axes are of high response ball screw drive. The left and right feed acceleration of X axis is 1G, the upper and lower feed acceleration of Y axis is 1G, and the ram feed acceleration of Z axis is 1.5g. The workpiece is clamped at one time to realize multi-sided milling, which greatly shortens the in-process time. It is especially suitable for multi-face and five-axis high-speed and high-efficiency processing of complex parts of die-cast aluminum automobiles. II. Technical parameters: 2. Accuracy performance: X/Y/Z axis positioning accuracy is 0.008/0.008/0.008 mm, and repeated positioning accuracy is 0.006/0.006/0.006 mm; A/C axis positioning accuracy is 12 arc seconds, and repeated positioning accuracy is 8 arc seconds, which meets the processing requirements of precision parts. 3. Speed performance: rapid displacement of X/Y/Z axis reaches 75/75/75m/min. The maximum cutting feed rate is 50m/min, and the fast feed speed of A/B axis is 50/75rpm. Combined with the efficient tool change system, the processing efficiency is greatly improved.
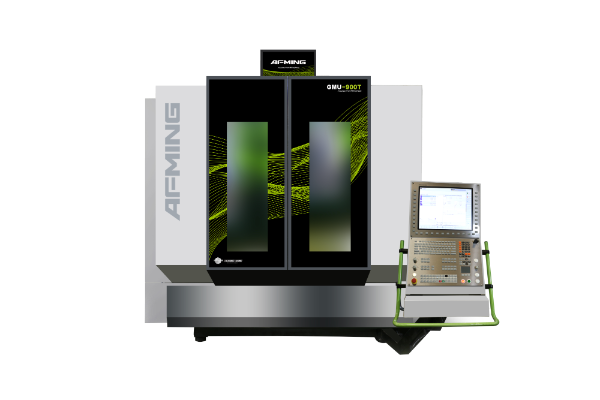
GMU-900T 5-axis machining center
GMU-900T 5-axis milling and turning center: 1. High rigidity: It is equipped with a crown block gantry frame, and the ribs are arranged reasonably to ensure that there is no vibration during milling and turning. The C-axis uses a high-torque automotive torque motor to ensure the smooth and powerful rotation of the workpiece in the turning mode. 2, high precision: A/C cradle table with patented gear backlash technology, no reverse clearance during processing, angle control to 0.001 °. Milling as the main, synchronous auxiliary turning process of the same clamping continuous processing, to avoid multiple positioning errors, precision life can reach several years. 3, high efficiency: equipped with 15000 rpm turn-milling composite electric spindle, standard 48 T tool magazine 12 seconds fast tool change, with automatic chip removal system, reduce non-processing time. Technical parameters: 1. Accuracy performance: X/Y/Z axis positioning accuracy: 0.008/0.008/0.007mm, repeated positioning accuracy: 0.005/0.005/0.004mm; A/C axis positioning accuracy: 8 arc seconds, repeated positioning accuracy: 5 arc seconds. 2. Speed performance: X/Y/Z axis fast displacement up to 40/40/40m/min, maximum cutting feed rate 20m/min, A/C axis fast feed speed 20/600rpm.


Six-dimensional force sensor for humanoid robot
Product advantages: Multi-axis synchronous calibration 5 times overload capacity Built-in low noise amplifier High accuracy 0.3% FS Technical advantages: Customization Ease of Use Compatibility Fast Deployment
.png)
Universal six-dimensional force sensor
Product advantages: Quick Customization Highly Integrated 5x Overload Level Technical advantages: Multi-axis synchronous calibration algorithm decoupling high-precision data acquisition

Joint torque sensor
Product advantages: 5 times overload capability Built-in low noise amplifier Comprehensive accuracy better than 0.5% Technical advantages: Structure decoupling design is simple and easy to use Data acquisition

GEN3 Multidimensional Tactile Sensor

Multidimensional Tactile Dexterous Hand DexH13
The multidimensional tactile dexterous hand DexH13 is the world's first dual-modal robotic end-effector integrating "multi-dimensional tactile sensing + Al vision". It integrates 1140 ITPU mhulti-dimensional tactile sensing units in a single hand,with up to 15 dimensions of human-like perceptions. It can achieve multi-dimensional force array sensing and real-time analysis of 15 physica properties, including material, temperature, texture, etc. The DexH13 irnnovatively adopts a four-finger, 16-DOF (13 active + 3 passive) bionic structure design,and the thumb has an independent four activeDOF. By eliminating the redundant little finger, more than 90% of the core hand movements can still be completed. Additionally,the hand is equipped with an 8MP RGB HD eye-in-hand camera. Paired with flexible and compliant motion control and high-precision force control, it can precisely perform complex actions such as grasping, gripping, pinching, pressing,and opening/closing fingers.It expeerforms challenging tasks like fragile object manipulation and precision assembly, bringing unprecedented convenience anefficiency improvements to various fields, including industrial manufacturing, logistics and warehousing, medical and heaIthcare, and education and research.

Multidimensional Tactile Humanoid Robot TORA-ONE
TORA-ONE is the first humanoid robot with multi-dimensional tactile sensing in Embodied Al industry. It has 53 degrees of freedom (DoF), and equipped with a multi-DoF dexterous dual-arm and 4-finger bionic structure design hand. Both hands are integrated with 2280 ITPU multi-dimensional tactile sensing units. Empowered bythe advanced VTLA-Model (Vision-Tactile-Language-Action Multimodal Perception Model) and PX-Core (Visual-Tactile BimodalModel Control Architecture), TORA-ONE has acquired comprehensive, sensitive, and fine-grained perception and powertful interaction skills, which enable it to rapidly learn autonomously and adapt to different environments, while performing compliant and flexible interactive collaboration in various scenarios Additionally, TORA-ONE features a foldable design in its waist struecture,enabling it to adjust its height range from 1.46 m to 1.86 m to accommodate various working height requirements. This provides broad application across multiple scenarios such as industrial manufacturing, healthcare and wellness, and warehouse logistics.